Skeuomorphic Virtual Object Manipulation
The Last Light features several interactive events which are tied into the main story, these are presented as skeuomorphic real-life scale objects, which the user can manipulate in real time.
Having to interact with virtual objects using hands as the input introduced cognitive dissonance, which often elicited negative feelings because of the user’s inability to manipulate the objects as they would in their everyday life. There is so much sensory feedback that happens in real life which we take for granted, because once we’ve learned how to use something our brains can quickly retrieve that information and execute the process in autopilot.
Skeuomorphic virtual objects imply identical affordances to their physical analogs, however, they lack most of the physical properties that would normally inform users about how to naturally interact with them. For example – the lack of physical contact prevents sensory perception of an object’s textures, the lack of mass means that users aren’t able to perceive the object’s weight as they move it around, there’s also no gravitational pull effected on the virtual object among many other factors…
In order to provide a usable interaction method we had to account for all the missing feedback and provide alternatives to visually and sonically communicate the state of an object clearly and consistently.
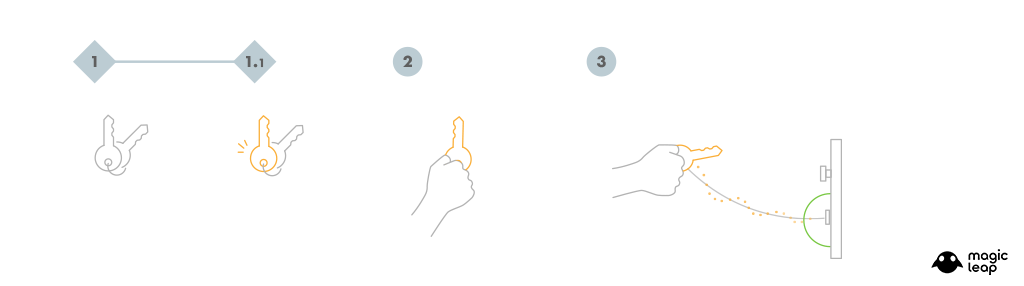
We observed that the way in which users expected to interact with these objects was very subjective, for example: not everyone grabbed a virtual key the same way, and the articulation of the wrist and fingers would be heavily influenced by the distance and angle in which the object was displayed relative to the user and their hand.
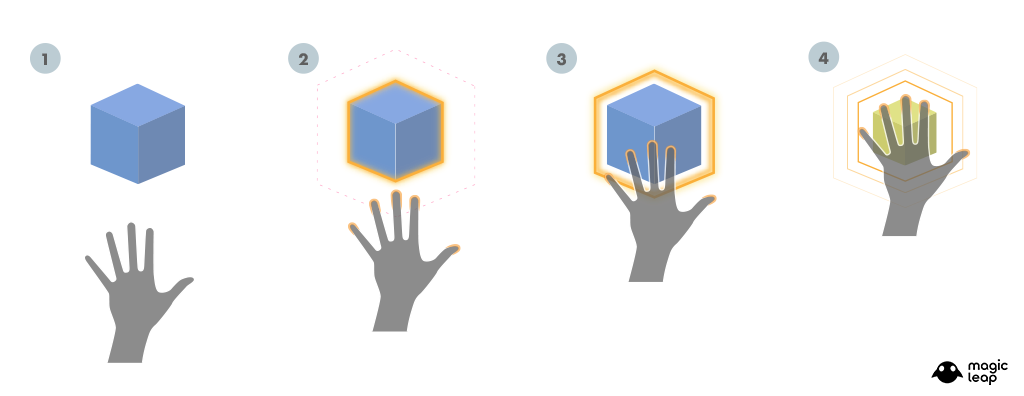
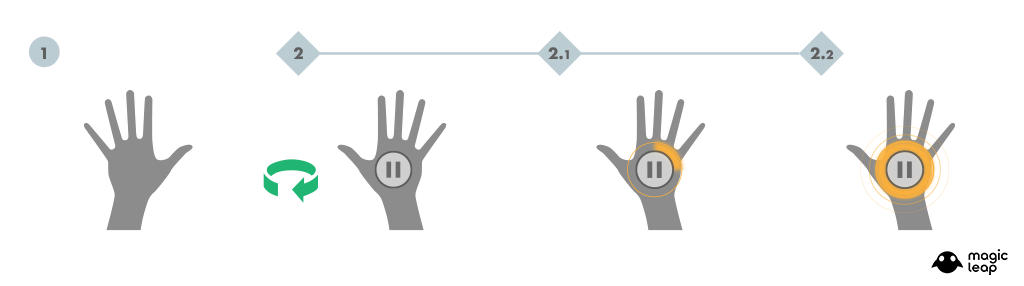
Knowing that we couldn’t control how a user would execute an interaction allowed us to develop a flexible system that accounted for error prevention and recovery. At its core, we knew that all interactions could be broken up into three basic steps:
- Affordance Signaling
- Object Activation
- Translation Towards Target